AI in Space
Offworld robots should act as bounded field engineers: mapping terrain, managing survival margins, repairing faults, and completing useful work despite delayed human control.
On Mars, a minor fault can sit inside a 20+ minute one-way command loop. An offworld robot cannot wait for Earth to solve every stuck wheel, broken tool, collapsed route, dust-covered sensor, or low-power decision.
Premise
Planetary robotics still behaves mostly like specialized machinery with pockets of autonomy. Rovers can navigate, sample, image, and avoid hazards, but they are not yet general field operators.
Offworld Generalist defines intelligence as survival-weighted competence: preserving mission continuity while exploring, constructing, repairing, sensing, and adapting under uncertainty.
The target is bounded planetary field intelligence, starting with a rover-class base, one repair arm, a tool bay, and conservative autonomy modes. Non-goals: unconstrained AGI, humanoid performance theater, open-ended improvisation, and autonomous decisions that exceed mission safety envelopes.
Why It Matters
The Moon, Mars, and other planetary surfaces punish teleoperation. Mars can impose roughly 21–23 minutes of one-way delay, while dust, thermal cycling, radiation, low gravity, terrain uncertainty, and scarce power reduce recovery margin.
Future surface missions need robots that transform terrain into operational capacity:
- scout safe routes and construction zones
- push regolith into berms and landing shields
- grade paths, dig cable trenches, and place solar base modules
- inspect habitats, rovers, power systems, and communication nodes
- repair or reconfigure damaged standardized parts
- survive darkness, sensor loss, and communication blackout
ISRU changes the design logic: regolith becomes berm material, rocks become anchors, graded terrain becomes infrastructure, and discarded parts become repair stock. The robot is not only a mobile sensor platform; it becomes the first layer of offworld infrastructure.
How It Works
The system is not a personality layer. It is a safety-bounded field-intelligence stack.

- World model: persistent 3D map with terrain shape, material estimates, hazards, tool locations, asset state, infrastructure state, and confidence levels.
- Survival layer: energy budget, thermal limits, dust risk, radiation exposure, actuator health, communication windows, and safe-mode recovery.
- Task planner: converts operator goals into mission trees with fallback routes, repair branches, abort thresholds, and review checkpoints.
- Embodied skill library: drive, anchor, dig, grasp, inspect, clear debris, deploy sensors, fasten modules, and replace standardized parts.
- Self-diagnosis loop: compares expected motion, force, power draw, and sensor feedback against reality to detect early failure.
- Human-AI command interface: humans define goals and constraints; the robot explains plans, uncertainty, trade-offs, and required intervention points.
The core loop is not “complete the task at all costs.” It is “complete useful work without sacrificing the future mission.” A robot should abandon a dig if wheel slip rises, choose a longer route if thermal margin is safer, or postpone construction if battery reserves threaten night survival.
The bottleneck is not cognition alone. Radiation-hardened compute, dust sealing, sensor degradation, mechanical redundancy, verification, power scarcity, and repairable hardware standards are equal constraints. Every autonomous action needs a safety envelope: expected force, power, slip, thermal cost, localization confidence, and abort condition.
Next
The next proof is Earth-analog: cheap, repeatable, instrumented.
Build a simulated “Planetary Field Engineer” benchmark, then repeat one mission chain on a rover-class robot in a regolith-analog yard:
- inspect a worksite
- move a tool
- clear an obstruction
- deploy a sensor
- return to charging point
Controlled failures should include a blocked route, degraded camera, low battery, missing tool, jammed actuator, and partial map corruption. Human responses should be delayed to force local judgment without pretending the robot is independent from mission control.
Success is boring autonomy: completing the mission chain while preserving safety margins, reporting uncertainty, logging operator-review points, and recovering without constant intervention.
Generation Prompts
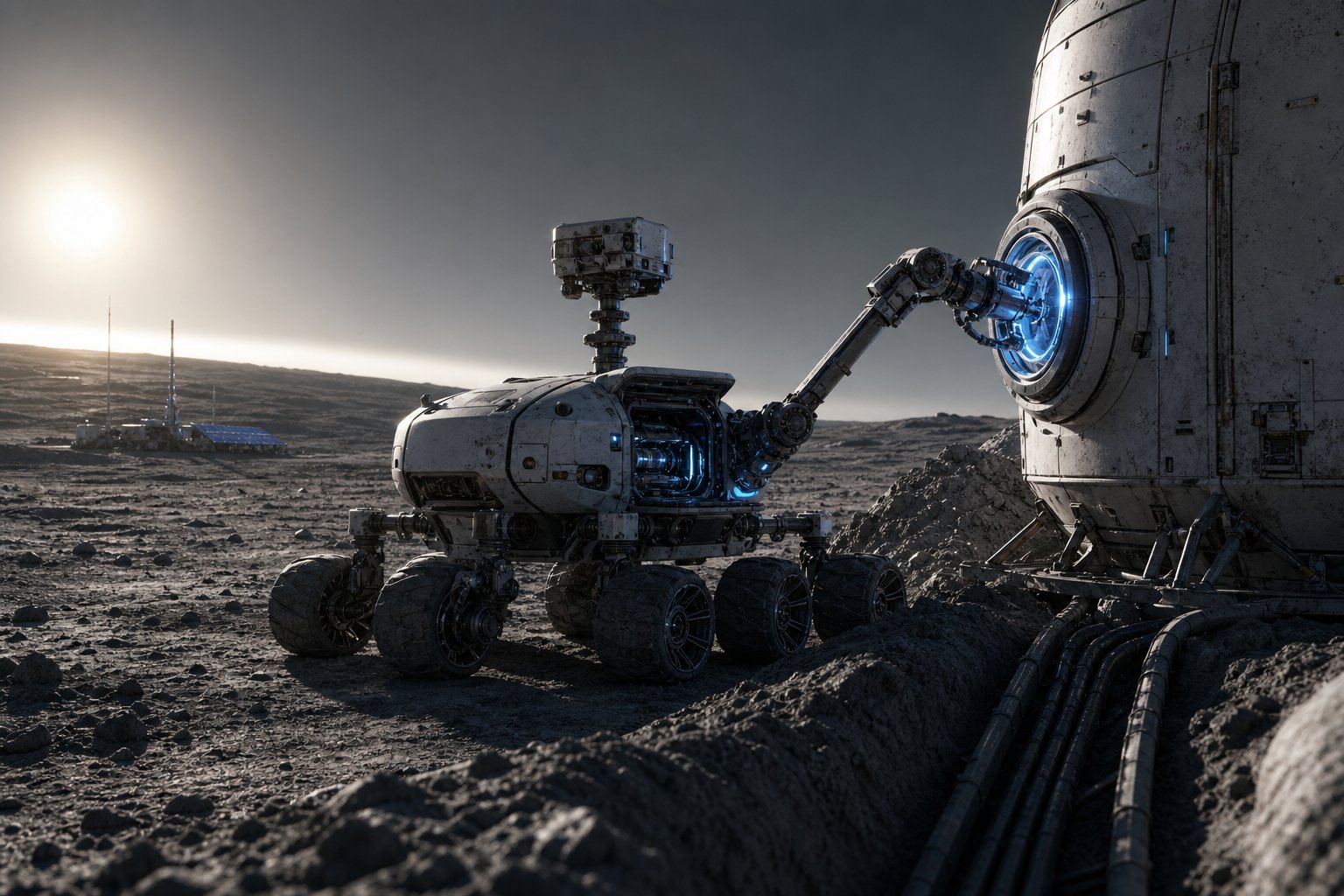
thumbnail rover-class offworld field engineer repairing a standardized module beside a regolith berm and cable trench, six rugged wheels, articulated repair arm, open compact tool bay, dust-coated sensor mast, small solar base in distance, graphite white aerospace shell with muted blue status lights, harsh low-angle sunlight, cinematic photoreal 3:2 hero composition, hyper-real studio-grade contrast
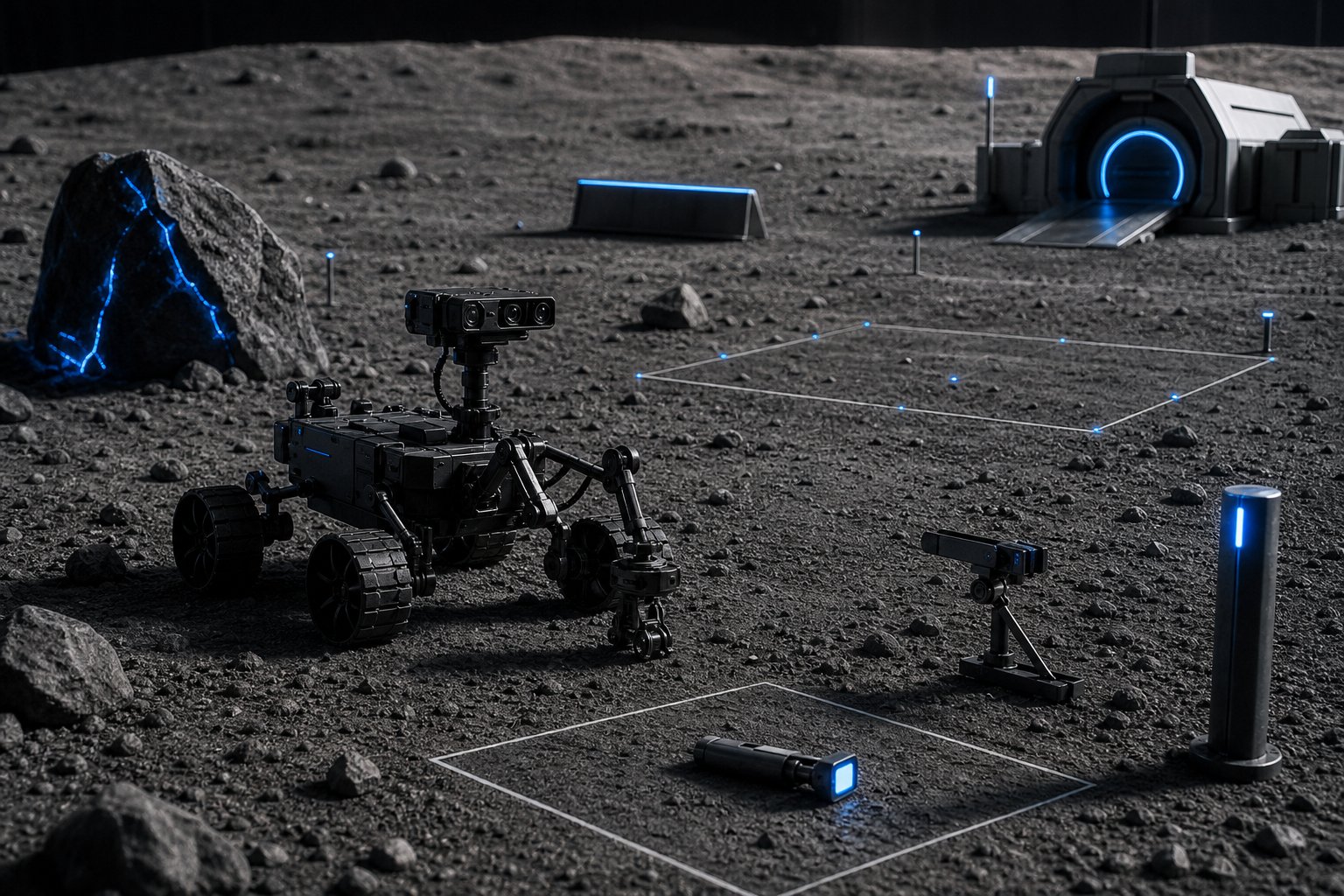
failure-benchmark Earth-analog regolith test yard with rover-class robot executing benchmark mission under controlled failures, blocked route barrier, degraded camera cover, missing tool marker, low battery warning panel, jammed actuator inspection station, charging dock at finish point, clean engineering markers and measurement grids, matte graphite vehicle, neutral daylight, documentary photoreal technical composition
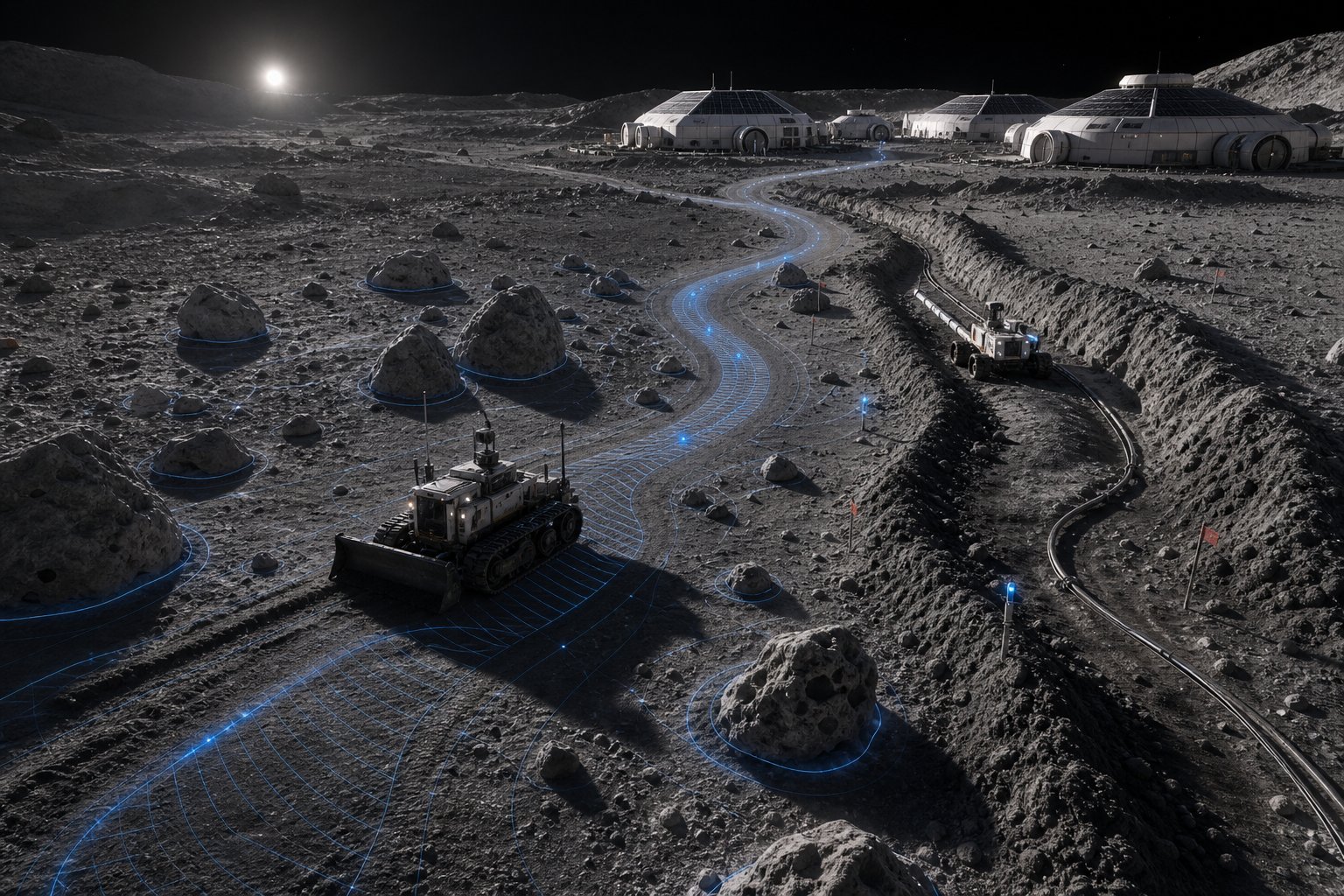
mission-overview planetary surface worksite showing bounded field robotics mission logic, rover mapping safe route around rocks toward solar base modules, graded regolith path, berm construction zone, hazard flags, cable trench, terrain confidence overlays subtly projected on dust, matte graphite and off-white materials, low sun rim light, wide technical overview, photoreal cinematic clarity
safety-stack cutaway visualization of an offworld rover field-intelligence stack inside rugged chassis, labeled layers as physical modules for world model, survival budget, task planner, skill library, self-diagnosis, battery and thermal cores, sealed compute bay, dust filters, radiation shielding, precise parametric layout, matte neutral materials, cool blue diagnostic glow, studio-lit hyper-real technical render